
- 1. Spacecraft Roll (fixed)
- 2. Jumping stripes in images (fixed)
- 3. Special observation sequences (fixed)
- 4. Empty halo detections
- 5. Planets (fixed)
1. Spacecraft Roll
Added: 29 May 2009Problem
Running difference of two images with different roll angle do not make sense: although we derotate the images with solar north up, the straylight pattern and position of the pylon in the images is different.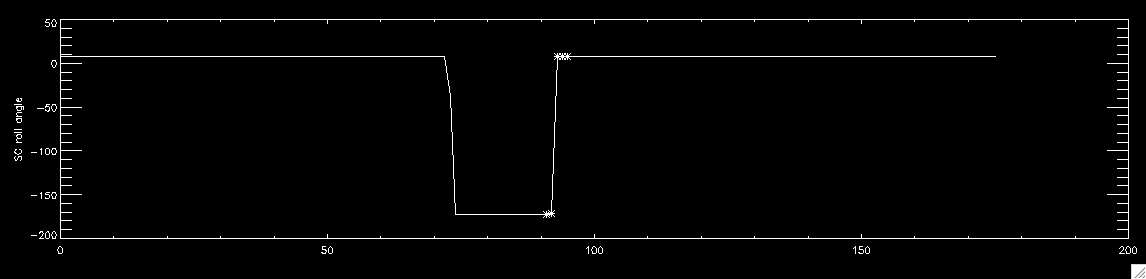
Figure 1a: We plotted the Roll angle of an image sequence. In Figure 2 we plot the running difference of the images marked with a asterix.
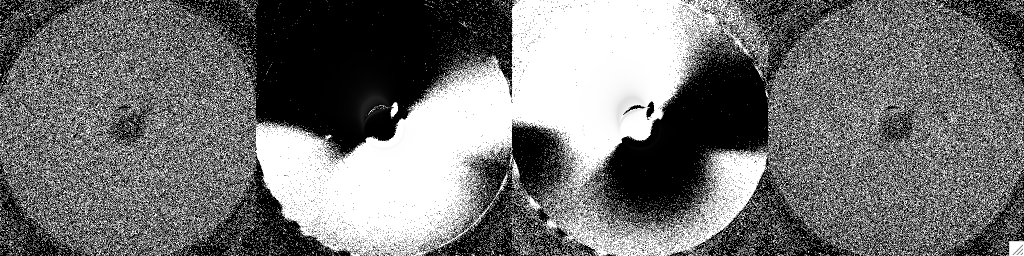
Figure 1b: Running difference of images during roll. Images with same roll angle look normal, images with roll angle deviating more than 0.01 degree are not usable.
Solution
Compare the roll angle before taking the running difference. If it is greater than 0.01, then make the difference image black. Since the STEREO spacecraft are continuously changing angle (but VERY slightly) we have to allow for a slight deviation (roll changes about 0.005 degrees per hour (~2 images), 1 degree per ~8.3 days and 0.1 degree per 20 hours).IF (hdr[i].crota-hdr[i-1].crota) gt 0.1 THEN ...Other keywords, having information on sc roll are: hdr.sc_roll, hdr.sc_rolla, hdr.crota. Since hdr.crota is updated by secchi_prep when rotating the image solar north up, we use the function get_stereo_roll() to measure the rotation.
Additional info
SC operations are listed here.CACTus Correction done in rundiff_cube.pro.
Remaining Problem
There are still false detections around times of SC rotation. Just before the roll, an icrease in small bright point-like features are seen. Is this because of the rolling?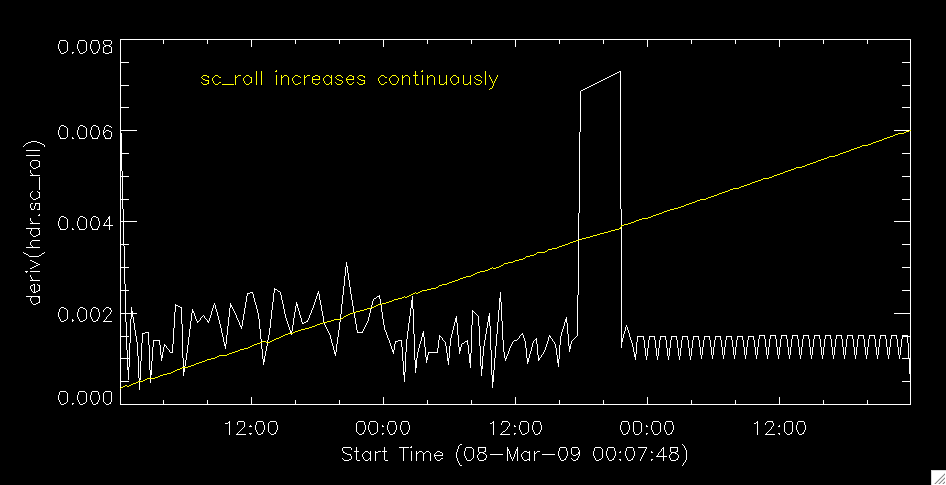
Figure 1c: Illustration of SC roll angle increment during the mission. The white data plots the difference in roll angle between 2 images. As can be seen, nominal values are very small. The yellow line shows the absolute increase in roll angle."
2. Jumping stripes in images
Added: 2 June 2009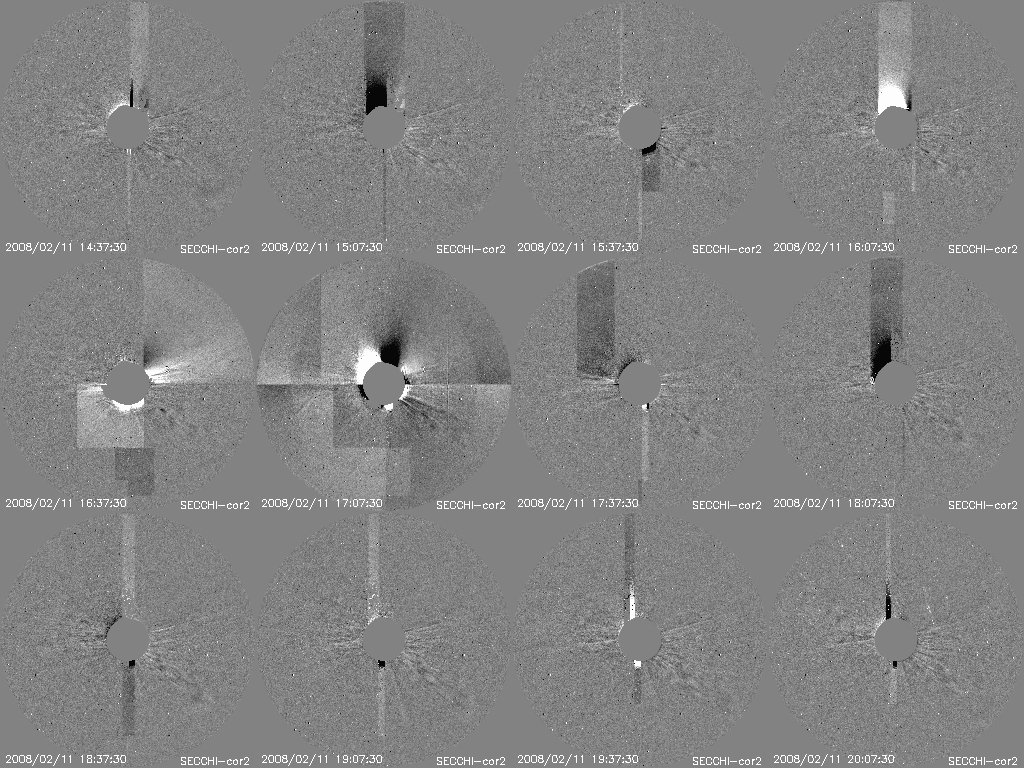
Figure 2: Sequence of bad running difference images from COR2A on February 11 2008.
Solution
The problem arises from rotating the images. Setting the /interp keyword in secchi_prep will solve the problem (this will rotate the images with interpolation).3. Special Observation sequences
Added: 2 June 2009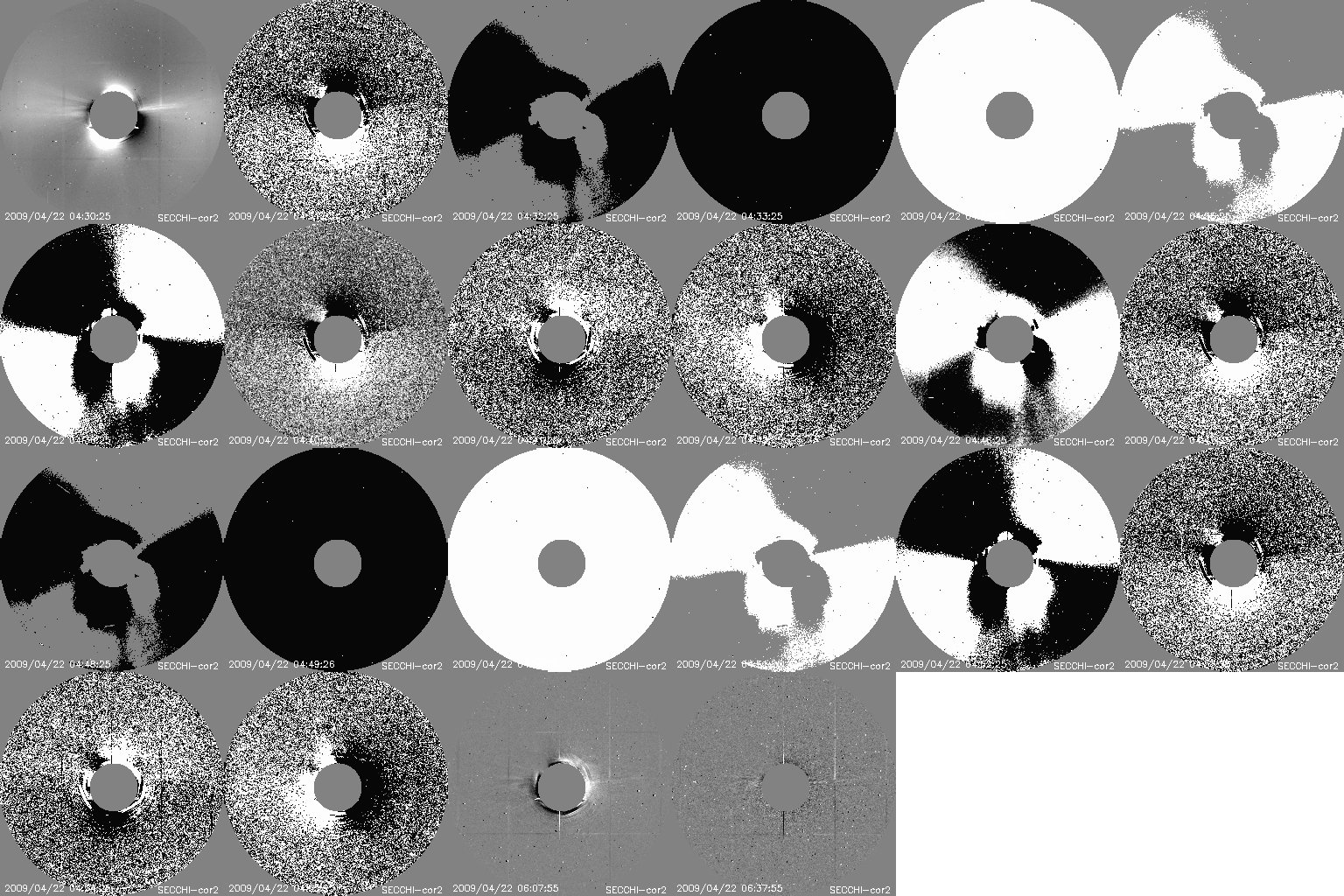
Figure 3a: Sequence of bad running difference images from COR2B on April 22 2009.
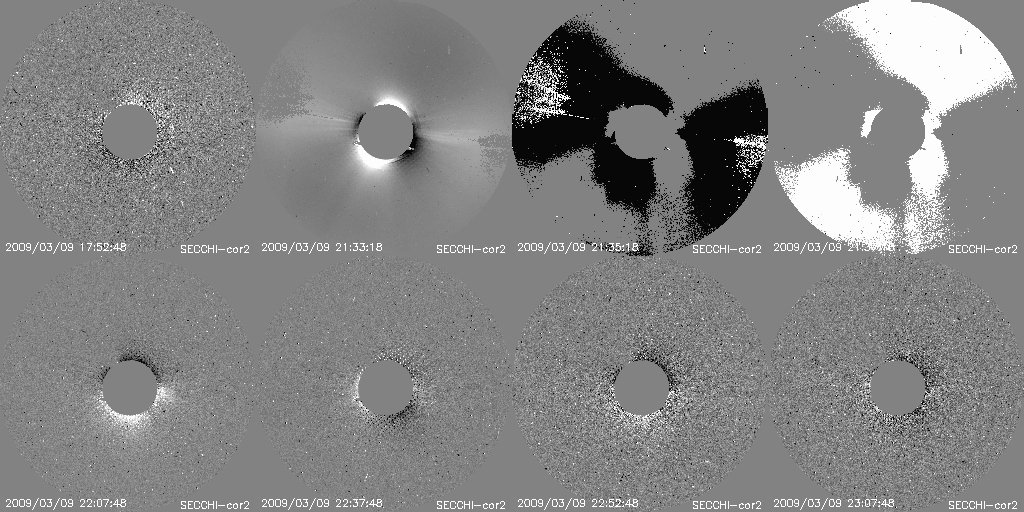
Figure 3b: Sequence of bad running difference images from COR2B on March 9 2009.
Solution
These special sequences are made to calibrate the instrument, or check special features. They are not part of the nominal observing progrm. The can be recognized as having a differeht hdr.obs_id. Up till now we found these "special" observation sequences: STEREO-A: 6 March 2009: obs_id=1785 STEREO-B: 22 April 2009: obs_id=1806,1809,1812,1815,1819,1822,1825,1828,1831,1834,18374. Empty halo detections (flows)
Added: 24 August 2009 In STEREO-B, there are several false detections (i.e. labeled as flow) spanning the whole 360 degrees around the occulter. There is nothing in the images that immediately reveals the reason of false detection. Examples are here: 1 June 2009, 15 June 2009, 23 June 2009.5. Planets
Added: 03 Sept 2009Problem
The planets Mercury and Venus may saturate the detector. Since they move too slow between two images, the cleaning in time will only remove part of the planet. Hence, a bright dot remains in the image and this causes false detections.Solution
Using the stereo_lon_lat.pro procedure, we determine if the planet if in the fov. For Mercury we do an extra test to discriminate between "behind the sun" and "in front of the sun" as seen from the spacecraft. Mercury only saturates the detector when it's behind (from the reflected light). Venus always saturates the spacecraft. If a bright planet is detected it will be removed by cactus by applying a median filter. To limit computation time, the filter is applied only in a small box around the planet. The routines added to cactus are find_planet.pro and remove_planet.pro. The figures below illustrate the performance of remove_planet.pro. The planet pixels are set to "-1" which in the running difference results in a zero-value (see rundiff.pro). The pixels are not replaced with the median or mean because this creates distortions in running difference.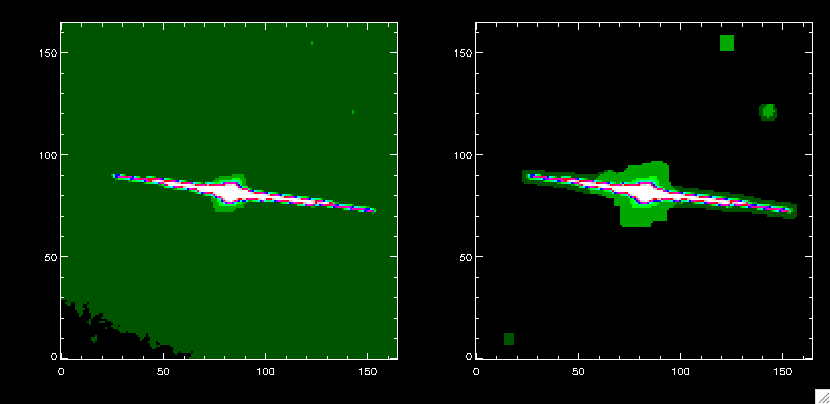
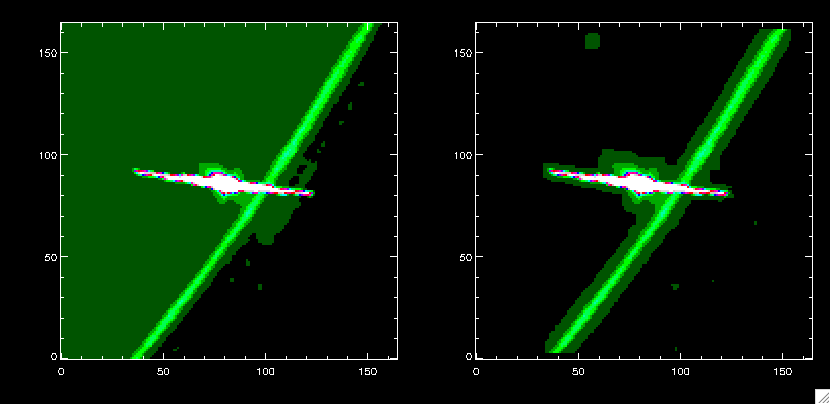
Figure 5: Two illustrations of planet Venus detection in COR2-B. The bottom panel shows the routine at work when the planet is on the edge of the FOV. The images were respectively taken on 2009-01-10 (top) and 2009-01-13 (bottom).